Förstå verktygsbanor i IRBCAM
En verktygsbana är en fördefinierad rutt eller sekvens som ett verktyg följer för att utföra en specifik uppgift, såsom skärning, svetsning, målning eller montering. Med andra ord beskriver en verktygsbana verktygets rörelse i rummet och det arbete du vill utföra. En verktygsbana kan vara enkel, som en rak linje i rummet, eller komplex, som en kontinuerlig 5-axlig bearbetningsoperation.
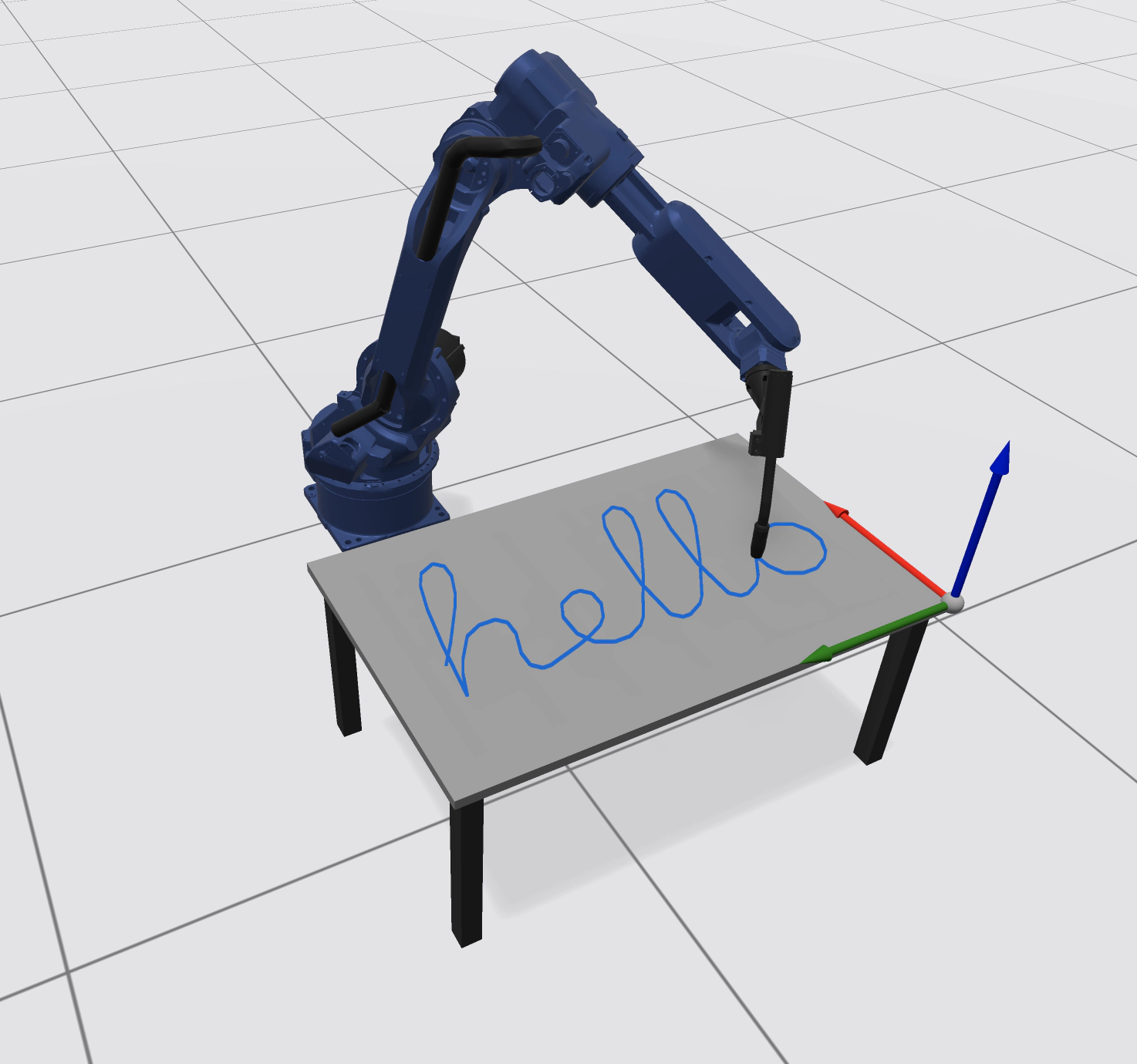
Vanligtvis definieras en verktygsbana inte initialt i förhållande till roboten, utan snarare till en lokal referens som hörnet av ett bord. I IRBCAM kan du flytta verktygsbanan för att få den att passa in i din arbetsstation och robotens räckvidd.
Skapa verktygsbanor i IRBCAM
I IRBCAM kan du skapa verktygsbanor på tre olika sätt, var och en anpassad till olika användarbehov och arbetsflöden:
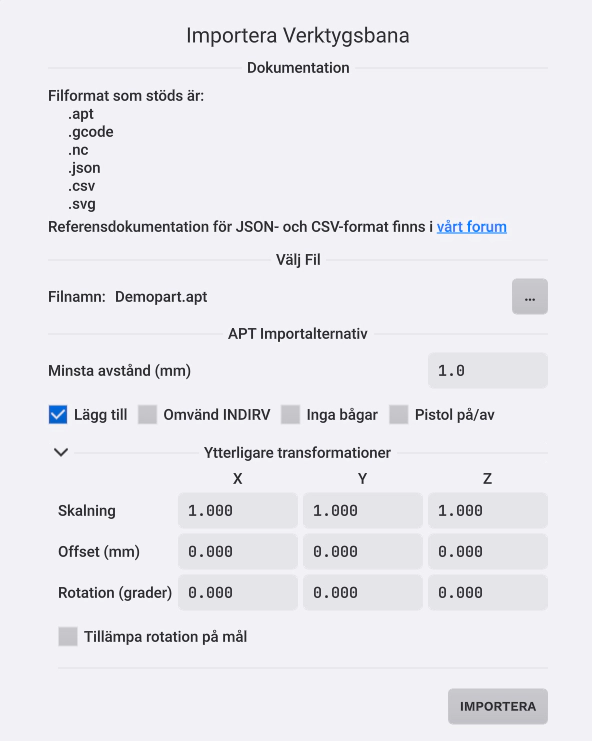
Importera en APT-fil från CAM-programvara
APT (Automatically Programmed Tool)-formatet är ett hög nivå-programmeringsspråk som används för att beskriva verktygsbanor. Historiskt sett programmerade CNC-maskinister maskiner direkt med APT, men idag används det mest som ett utbytesformat. De flesta CAM-programvaror (Computer-Aided Manufacturing) stödjer export av verktygsbanor i APT-format.
- Fördelar:
- Sömlös integration: Enkel övergång från CAM-programvara till IRBCAM.
- Hantera komplexitet: Att använda CAM för att skapa verktygsbanor gör det enklare att hantera komplicerade operationer.
- Noggrannhet: Behåller de exakta specifikationerna och precisionen från den CAM-genererade verktygsbanan.
Importera JSON- eller CSV-filer
Om du redan har verktygsbanedata i ett strukturerat format, som JSON eller CSV, tillåter IRBCAM dig att importera dessa data för att skapa verktygsbanor.
- Fördelar:
- Full kontroll: Ange alla mål explicit. Du har full kontroll över varje aspekt av verktygsbanan.
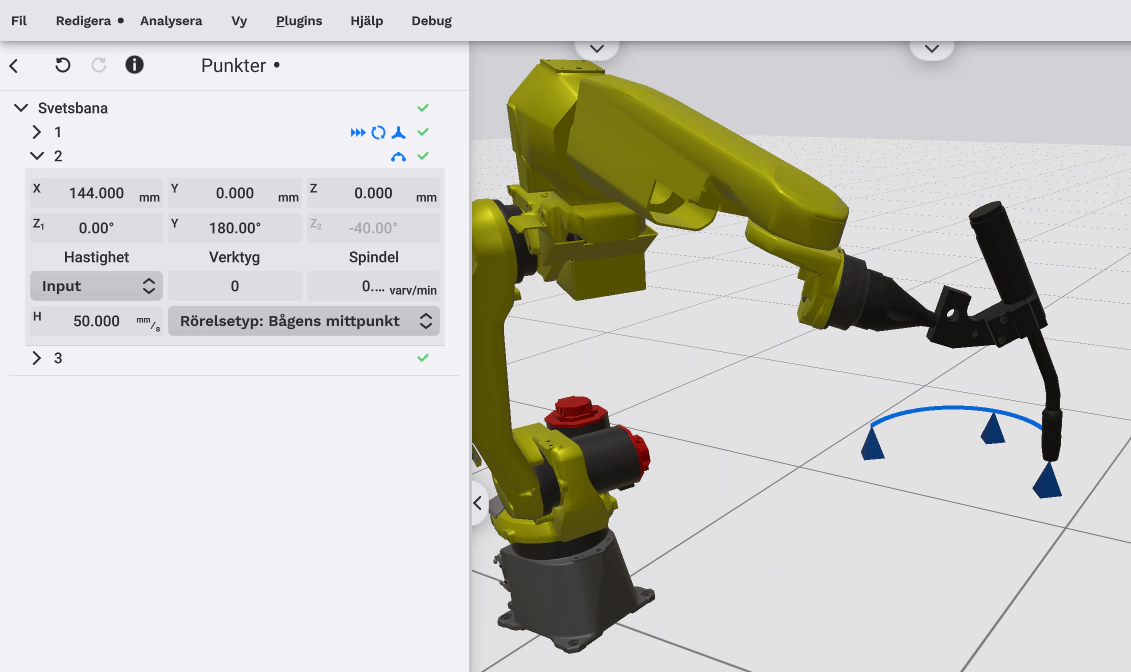
Manuellt ställa in verktygsbanan i IRBCAM
Utöver import erbjuder IRBCAM ett praktiskt gränssnitt för att manuellt ställa in och redigera verktygsbanor.
- Fördelar:
- Snabbt: För enkla verktygsbanor är det otroligt snabbt att ställa in din bana.
- Visuellt: Du kan se var ditt mål är i förhållande till din robot när som helst.
- Realtidsåterkoppling: Se om roboten kan nå alla dina mål medan du redigerar din bana.
Slutsats
IRBCAM erbjuder flera sätt att skapa verktygsbanor, anpassade till användare med olika expertisnivåer och varierande projektkrav. Oavsett om du importerar komplexa banor från CAM-programvara, använder strukturerade datafiler eller bygger från grunden, tillhandahåller IRBCAM de verktyg du behöver för att få din robot att röra sig effektivt och exakt. Du kanske vill kolla in våra videotutorials.