Om IRBCAM – Programmer din robot
IRBCAM är en programvara för offline-robotprogrammering (OLP) och simulering. Vårt mål är att hjälpa dig att snabbt skapa avancerade robotprogram, simulera, inspektera och verifiera innan du exporterar programmet och laddar det till din robot. I de flesta fall är indata till IRBCAM en 3, 4 eller 5-axlig NC-verktygsbana från din favorit-CAD/CAM-programvara, eller skriptspråk som MATLAB och Python. Det finns många möjliga användningsfall, men de mest populära är robotbaserad materialbearbetning som fräsning, skärning, limning eller svetsning.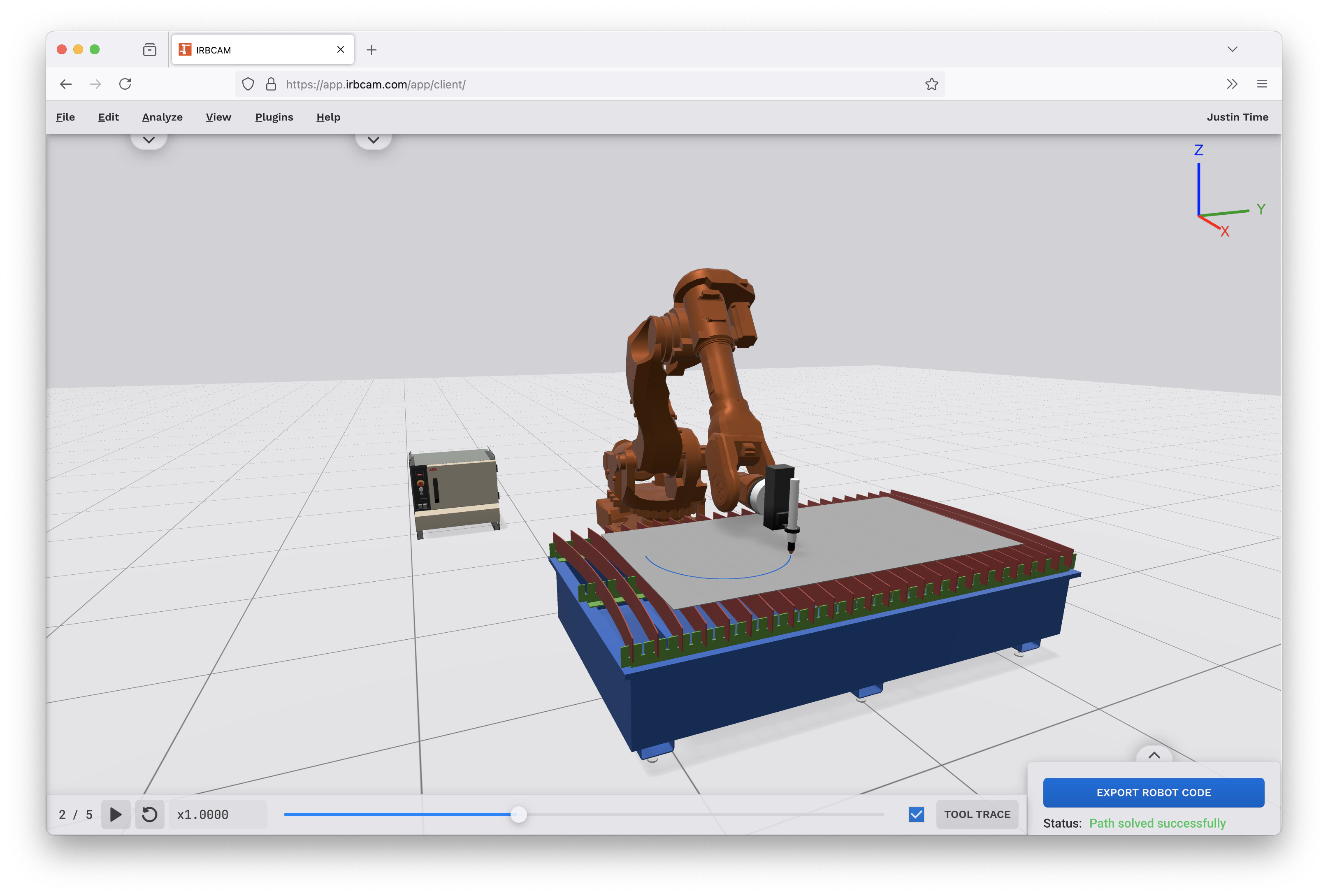
Som en webbapplikation körs IRBCAM direkt i din webbläsare. Du behöver inte oroa dig för installation, uppdateringar eller var du lagrar dina projekt. Detta innebär också att du kan köra IRBCAM på vilken enhet som helst med en modern webbläsare och en medelstor eller stor skärm.
Produktion
IRBCAM är utformad för att överbrygga klyftan mellan CAM-programvara och industrirobotar i materialbearbetningsapplikationer. Medan traditionella maskiner som CNC-fräsar direkt kan använda CAM-genererad kod, kräver industrirobotar ofta ett annat tillvägagångssätt. IRBCAM kan importera verktygsbanor från APT-format och erbjuder en miljö för att simulera och verifiera uppgifter innan de körs. Välj din robot, importera verktygsbanan och exportera ditt robotprogram. IRBCAM hanterar de matematiska transformationerna och din robots specifika programmeringsspråk. Läs mer om verktygsbanor