Forstå verktøybaner i IRBCAM
En verktøybane er en forhåndsdefinert rute eller sekvens som et verktøy følger for å utføre en spesifikk oppgave, for eksempel kutting, sveising, maling eller montering. Med andre ord beskriver en verktøybane bevegelsen til verktøyet ditt i rommet og dermed arbeidet du ønsker å utføre. En verktøybane kan være enkel, som en rett linje i rommet, eller kompleks, som en kontinuerlig 5-akset maskineringsoperasjon.
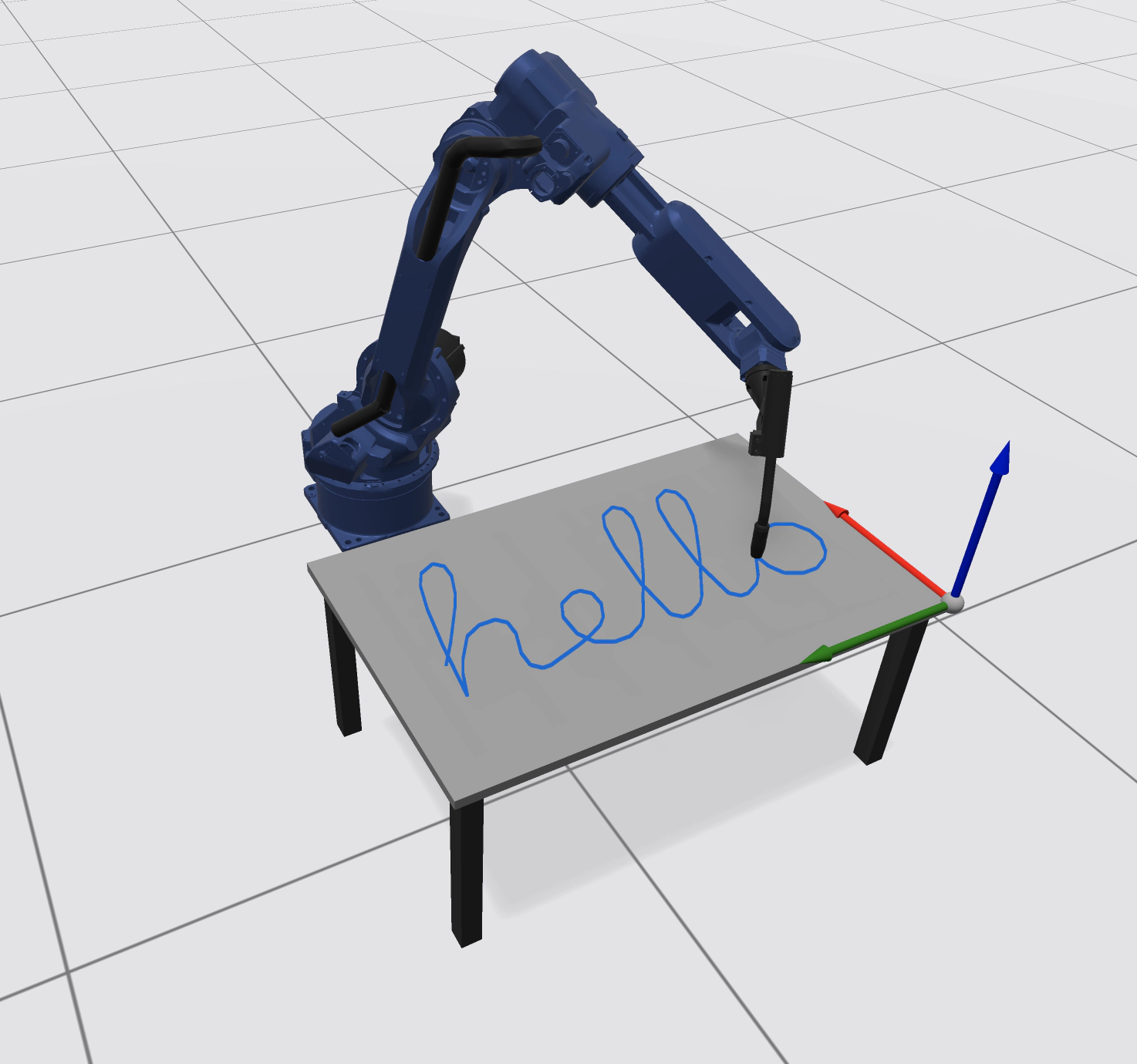
Vanligvis er en verktøybane i utgangspunktet ikke definert i forhold til roboten, men i forhold til en lokal referanse som et hjørne på et bord. I IRBCAM kan du flytte verktøybanen for å tilpasse den til arbeidsstasjonen og robotens rekkevidde.
Lage verktøybaner i IRBCAM
I IRBCAM kan du lage verktøybaner på tre ulike måter, tilpasset forskjellige brukerbehov og arbeidsflyter:
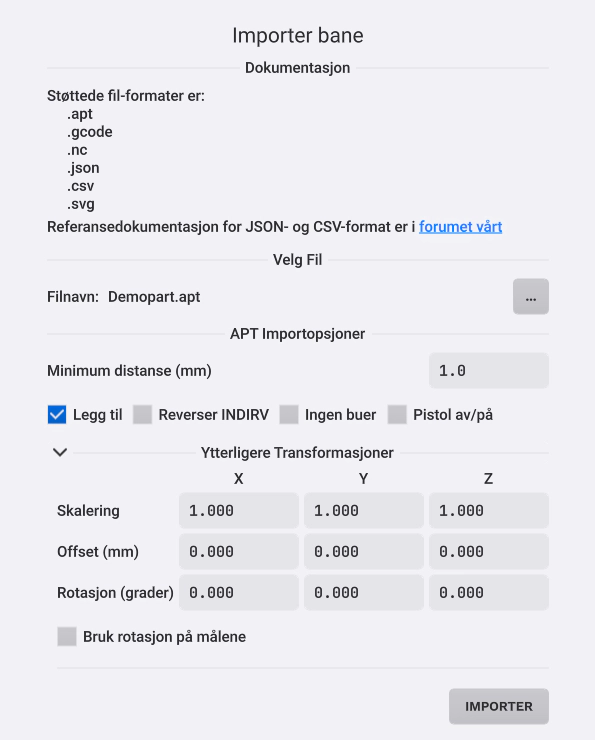
Importere en APT-fil fra CAM-programvare
APT (Automatically Programmed Tool)-formatet er et høynivå programmeringsspråk som brukes til å beskrive verktøybaner. Historisk sett programmerte CNC-operatører maskiner direkte med APT, men i dag brukes det mest som et utvekslingsformat. De fleste CAM-programmer (Computer-Aided Manufacturing) støtter eksport av verktøybaner i APT-format.
- Fordeler:
- Sømløs integrasjon: Enkel overgang fra CAM-programvare til IRBCAM.
- Håndter kompleksitet: Det er enklere å håndtere kompliserte operasjoner når verktøybaner opprettes i CAM.
- Nøyaktighet: Bevarer de eksakte spesifikasjonene og presisjonen fra CAM-generert verktøybane.
Importere JSON- eller CSV-filer
Hvis du allerede har verktøybanedata i et strukturert format som JSON eller CSV, kan du importere dette til IRBCAM for å lage verktøybaner.
- Fordeler:
- Full kontroll: Du definerer alle mål eksplisitt. Du har full kontroll over alle aspekter av verktøybanen.
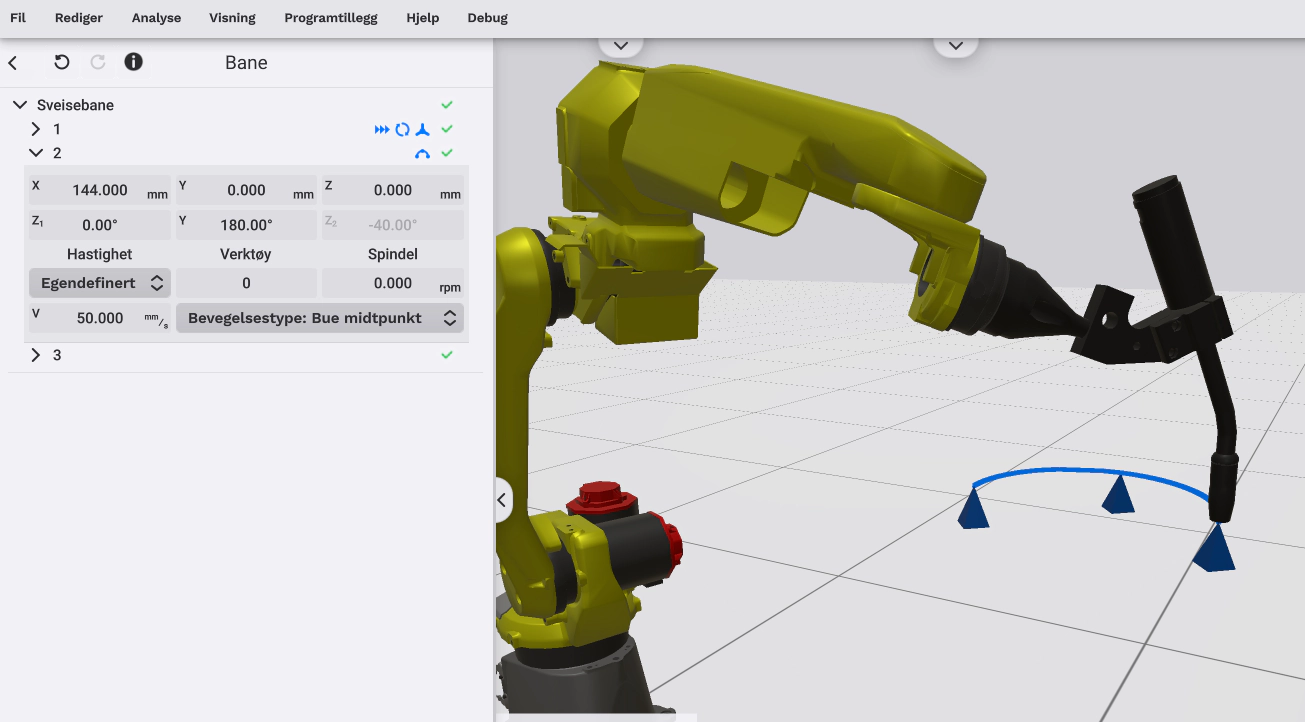
Manuelt oppsett av verktøybane i IRBCAM
I tillegg til import tilbyr IRBCAM et brukervennlig grensesnitt for å sette opp og redigere verktøybaner manuelt.
- Fordeler:
- Raskt: For enkle verktøybaner går det veldig raskt å sette opp banen.
- Visuelt: Du kan alltid se hvor målet ditt er i forhold til roboten.
- Sanntids tilbakemelding: Du ser om roboten kan nå alle mål mens du redigerer banen.
Konklusjon
IRBCAM tilbyr flere måter å lage verktøybaner på – tilpasset brukere med ulik erfaring og ulike prosjektkrav. Enten du importerer komplekse baner fra CAM-programvare, bruker strukturerte datafiler, eller bygger fra bunnen av, gir IRBCAM deg verktøyene du trenger for å få roboten til å bevege seg effektivt og presist. Du kan også se våre videoveiledninger.