Om IRBCAM – Programmer roboten din
IRBCAM er en programvare for offline robotprogrammering (OLP) og simulering. Vårt mål er å hjelpe deg med å raskt lage avanserte robotprogrammer, simulere, inspisere og verifisere før du eksporterer programmet og laster det inn i roboten din. I de fleste tilfeller vil inndata til IRBCAM være en 3, 4 eller 5-akset NC-verktøybane som kommer fra din favoritt CAD/CAM-programvare, eller skriptspråk som MATLAB og Python. Det finnes mange potensielle bruksområder, men de mest populære er robotbasert materialbehandling som fresing, kutting, liming eller sømsveising.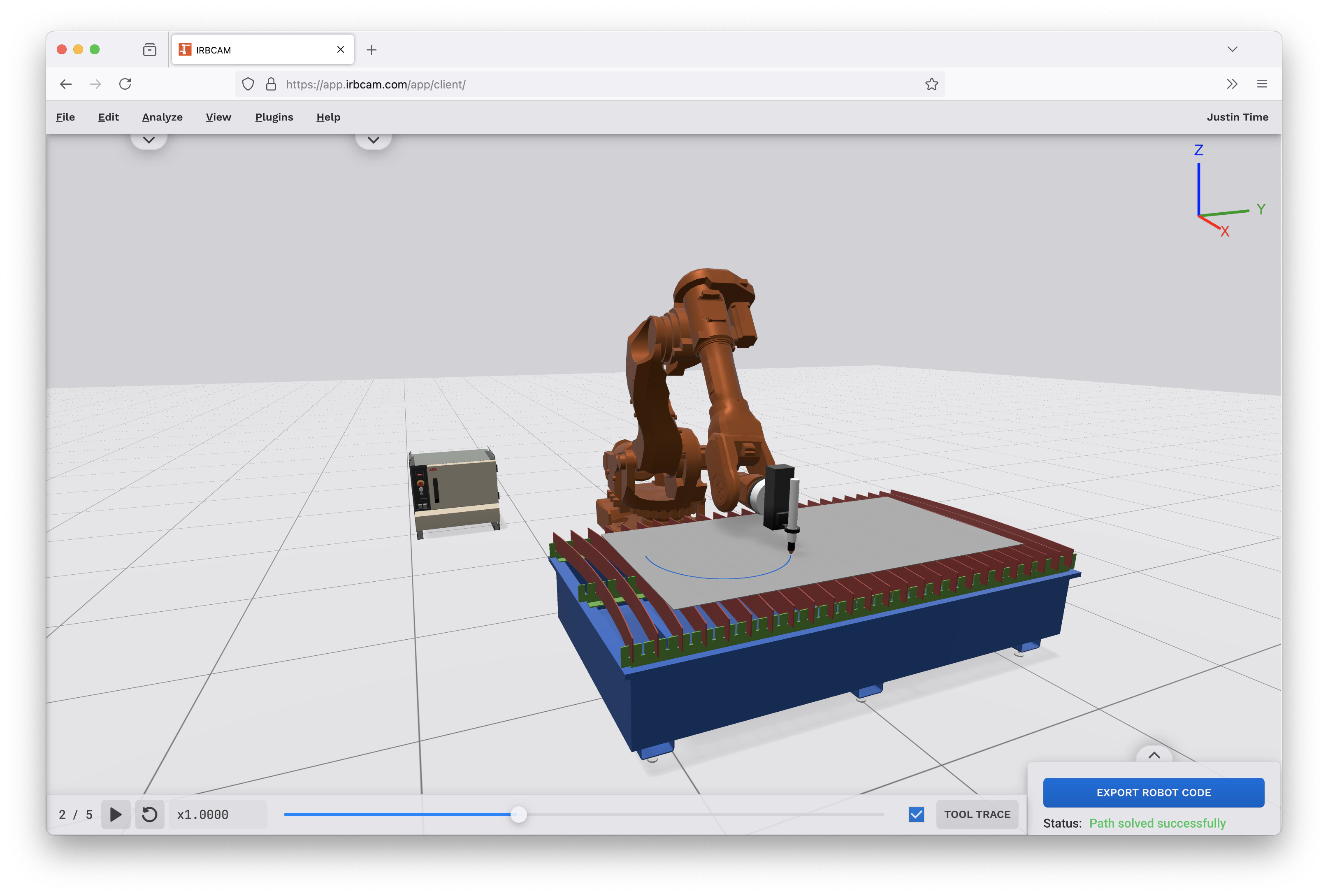
Som en nettbasert applikasjon kjører IRBCAM direkte i nettleseren din. Du trenger ikke å bekymre deg for installasjon, oppdateringer eller hvor du lagrer prosjektene dine. Dette betyr også at du kan kjøre IRBCAM på enhver enhet med en moderne nettleser og en middels eller stor skjerm.
Produksjon
IRBCAM er utviklet for å bygge bro mellom CAM-programvare og industriroboter i materialbehandlingsapplikasjoner. Mens tradisjonelle maskiner som CNC-fresere direkte kan bruke CAM-generert kode, krever industriroboter ofte en annen tilnærming. IRBCAM kan importere verktøybaner fra APT-format og tilbyr et miljø for å simulere og verifisere oppgaver før de kjøres. Velg roboten din, importer verktøybanen og eksporter robotprogrammet ditt. IRBCAM håndterer de matematiske transformasjonene og robotens spesifikke programmeringsspråk. Les mer om toolpaths