Verständnis von Werkzeugwegen in IRBCAM
Ein Werkzeugweg ist eine vordefinierte Route oder Abfolge, der ein Werkzeug folgt, um eine bestimmte Aufgabe auszuführen, z. B. Schneiden, Schweißen, Lackieren oder Montieren. Anders ausgedrückt beschreibt ein Werkzeugweg die Bewegung Ihres Werkzeugs im Raum und damit auch die auszuführende Arbeit. Ein Werkzeugweg kann einfach sein, wie eine gerade Linie im Raum, oder komplex, wie eine kontinuierliche 5-Achs-Bearbeitung.
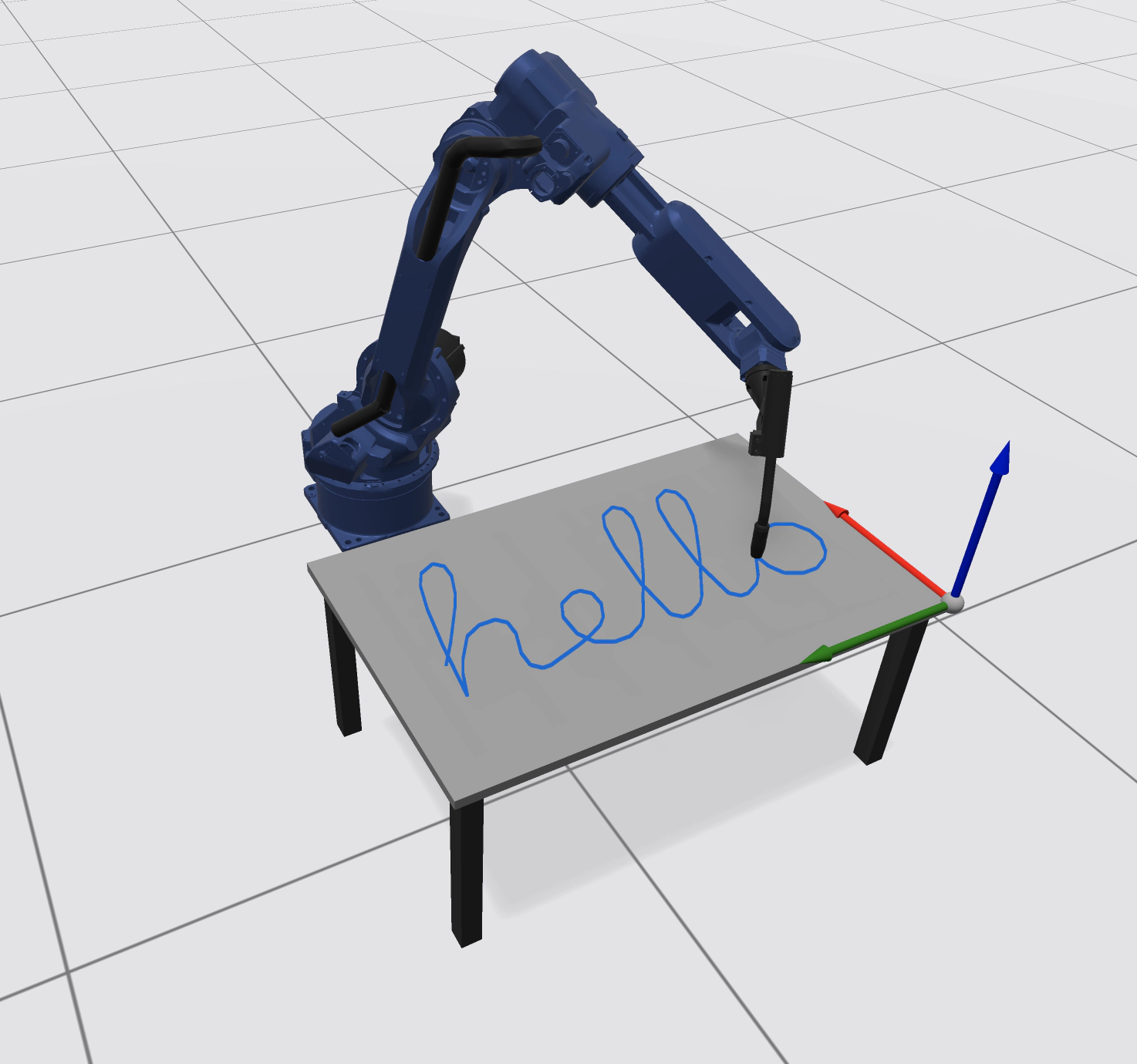
In der Regel ist ein Werkzeugweg zunächst nicht relativ zum Roboter definiert, sondern zu einem lokalen Bezugspunkt, wie z. B. einer Tischecke. In IRBCAM können Sie den Werkzeugweg verschieben, um ihn an Ihre Arbeitsstation und die Erreichbarkeit des Roboters anzupassen.
Werkzeugwege in IRBCAM erstellen
In IRBCAM können Sie Werkzeugwege auf drei verschiedene Arten erstellen – je nach Benutzerbedürfnis und Arbeitsweise:
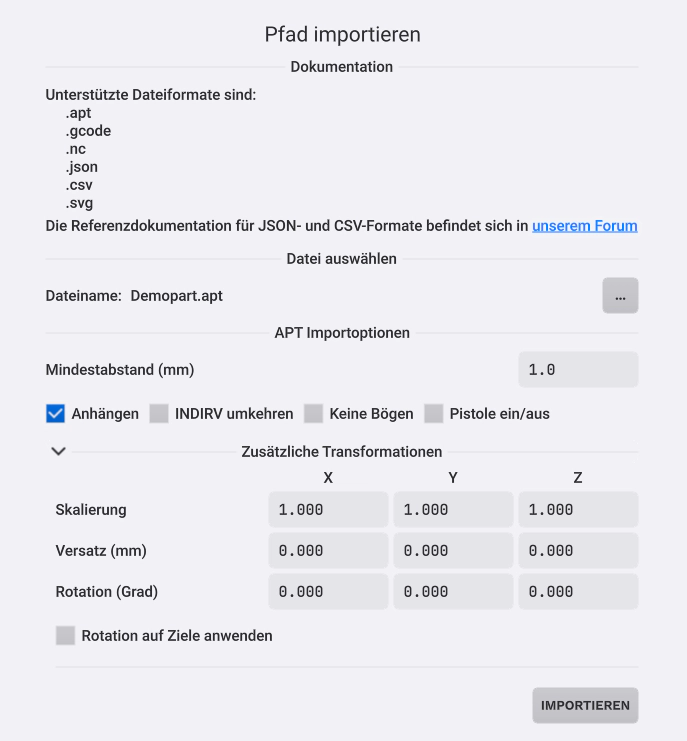
Import einer APT-Datei aus CAM-Software
Das APT (Automatically Programmed Tool)-Format ist eine Programmiersprache auf hoher Ebene zur Beschreibung von Werkzeugwegen. Früher programmierten CNC-Fachleute Maschinen direkt mit APT, heutzutage wird es meist als Austauschformat verwendet. Die meisten CAM-Programme (Computer-Aided Manufacturing) unterstützen den Export von Werkzeugwegen im APT-Format.
- Vorteile:
- Nahtlose Integration: Einfacher Übergang von CAM-Software zu IRBCAM.
- Komplexitätsmanagement: Die Erstellung von Werkzeugwegen in CAM erleichtert den Umgang mit komplexen Operationen.
- Genauigkeit: Die exakten Spezifikationen und die Präzision des CAM-generierten Werkzeugwegs bleiben erhalten.
Import von JSON- oder CSV-Dateien
Wenn Sie bereits Werkzeugweg-Daten in einem strukturierten Format wie JSON oder CSV vorliegen haben, können Sie diese in IRBCAM importieren, um Werkzeugwege zu erstellen.
- Vorteile:
- Volle Kontrolle: Alle Zielpunkte werden explizit definiert. Sie haben vollständige Kontrolle über jeden Aspekt des Werkzeugwegs.
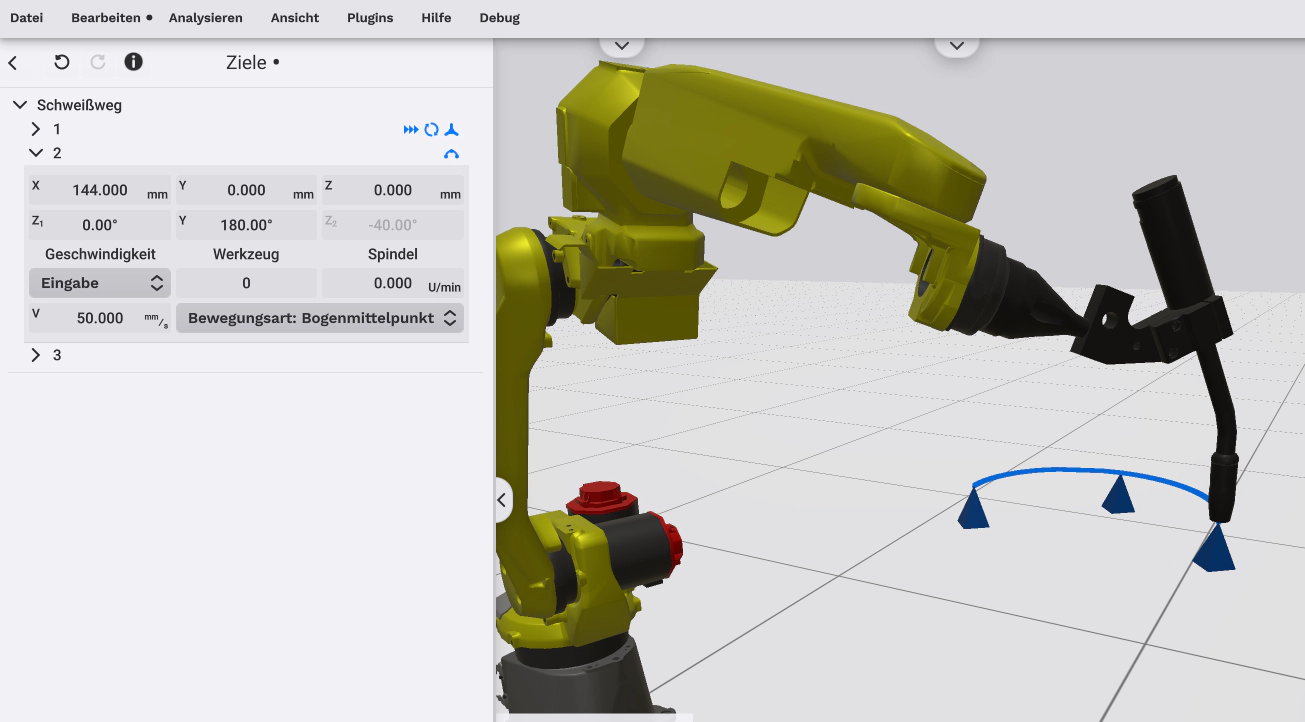
Manuelles Einrichten des Werkzeugwegs in IRBCAM
Zusätzlich zum Import bietet IRBCAM eine benutzerfreundliche Oberfläche, mit der Sie Werkzeugwege manuell einrichten und bearbeiten können.
- Vorteile:
- Schnell: Für einfache Werkzeugwege ist die Einrichtung extrem schnell.
- Visuell: Sie sehen jederzeit, wo sich Ihr Ziel im Verhältnis zum Roboter befindet.
- Echtzeit-Feedback: Während Sie den Pfad bearbeiten, sehen Sie, ob der Roboter alle Ziele erreichen kann.
Fazit
IRBCAM bietet mehrere Möglichkeiten zur Erstellung von Werkzeugwegen – für Anwender mit unterschiedlichen Erfahrungsstufen und Projektanforderungen. Ob Sie komplexe Pfade aus CAM-Software importieren, strukturierte Datenformate verwenden oder komplett neu beginnen – IRBCAM stellt die Werkzeuge bereit, mit denen Sie Ihren Roboter effizient und präzise bewegen können. Werfen Sie auch einen Blick auf unsere Video-Tutorials.