Über IRBCAM – Programmieren Sie Ihren Roboter
IRBCAM ist eine Software für Offline-Roboterprogrammierung (OLP) und Simulation. Unser Ziel ist es, Ihnen zu helfen, schnell fortschrittliche Roboterprogramme zu erstellen, zu simulieren, zu überprüfen und zu verifizieren, bevor Sie das Programm exportieren und in Ihren Roboter laden. In den meisten Fällen sind die Eingabedaten für IRBCAM eine 3-, 4- oder 5-achsige NC-Werkzeugbahn, die aus Ihrer bevorzugten CAD/CAM-Software oder aus Skriptsprachen wie MATLAB und Python stammt. Es gibt viele potenzielle Anwendungsfälle, aber die beliebtesten sind roboterbasierte Materialbearbeitung wie Fräsen, Schneiden, Kleben oder Nahtschweißen.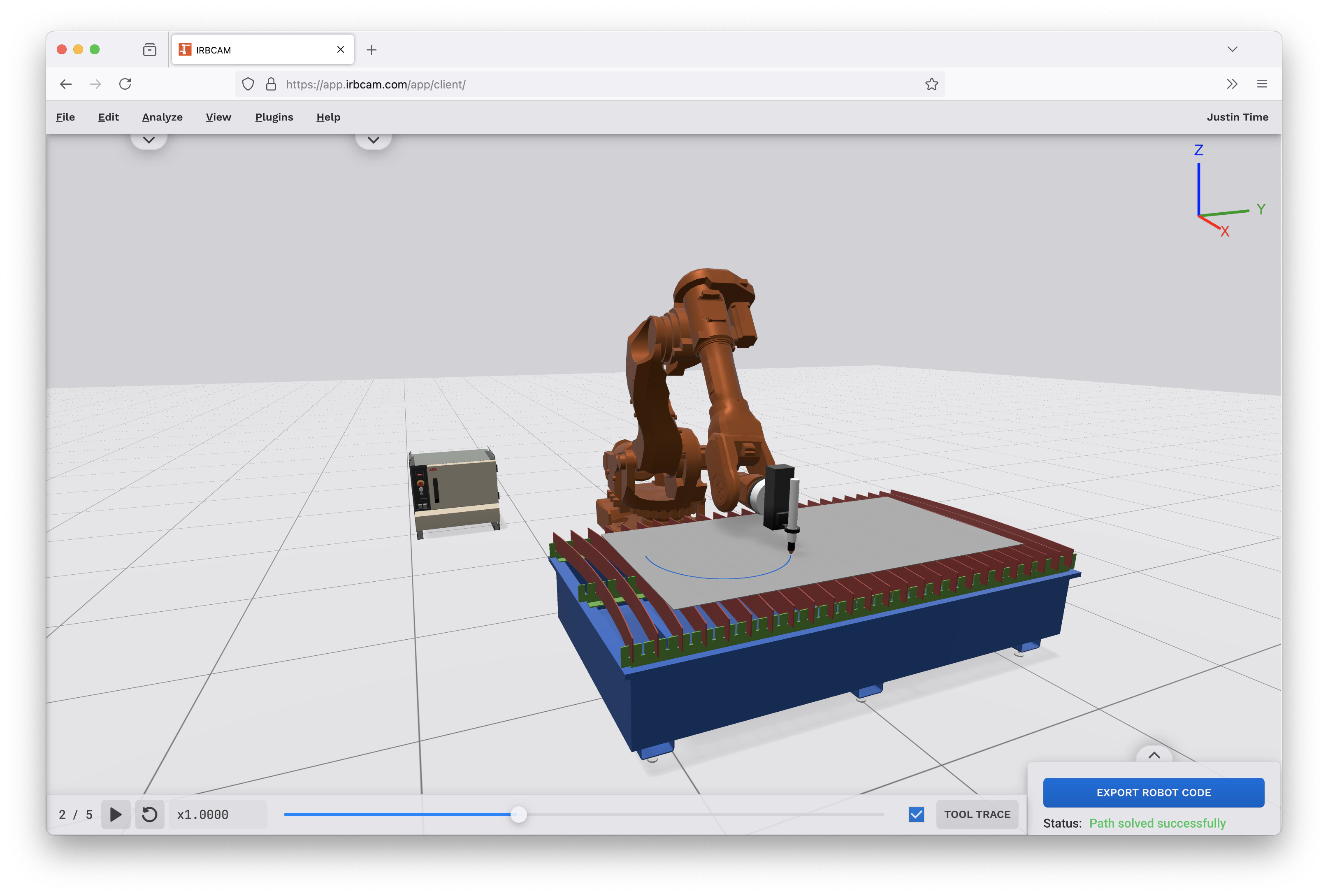
Als webbasierte Anwendung läuft IRBCAM direkt in Ihrem Browser. Sie müssen sich keine Gedanken über Installation, Updates oder die Speicherung Ihrer Projekte machen. Dies bedeutet auch, dass Sie IRBCAM auf jedem Gerät mit einem modernen Webbrowser und einem mittelgroßen oder großen Display ausführen können.
Produktion
IRBCAM wurde entwickelt, um die Kluft zwischen CAM-Software und Industrierobotern in Materialbearbeitungsanwendungen zu überbrücken. Während traditionelle Maschinen wie CNC-Fräsen direkt CAM-generierten Code verwenden können, erfordern Industrieroboter oft einen anderen Ansatz. IRBCAM kann Werkzeugbahnen im APT-Format importieren und bietet eine Umgebung, um Aufgaben vor der Ausführung zu simulieren und zu verifizieren. Wählen Sie Ihren Roboter aus, importieren Sie die Werkzeugbahn und exportieren Sie Ihr Roboterprogramm. IRBCAM kümmert sich um die mathematischen Transformationen und die spezifische Programmiersprache Ihres Roboters. Lesen Sie mehr über toolpaths