About IRBCAM – Program Your Robot
IRBCAM is an Offline Robot Programming (OLP) and simulation software. Our aim is to help you quickly create advanced robot programs, simulate, inspect and verify before exporting the program and loading it into your robot. In most cases the input to IRBCAM will be a 3,4 or 5-axis NC toolpath coming from your favourite CAD/CAM software, or scripting languages such as MATLAB and Python. There are many potential uses cases, however the most popular ones are robotic material processing like milling, cutting, glueing or seam-welding.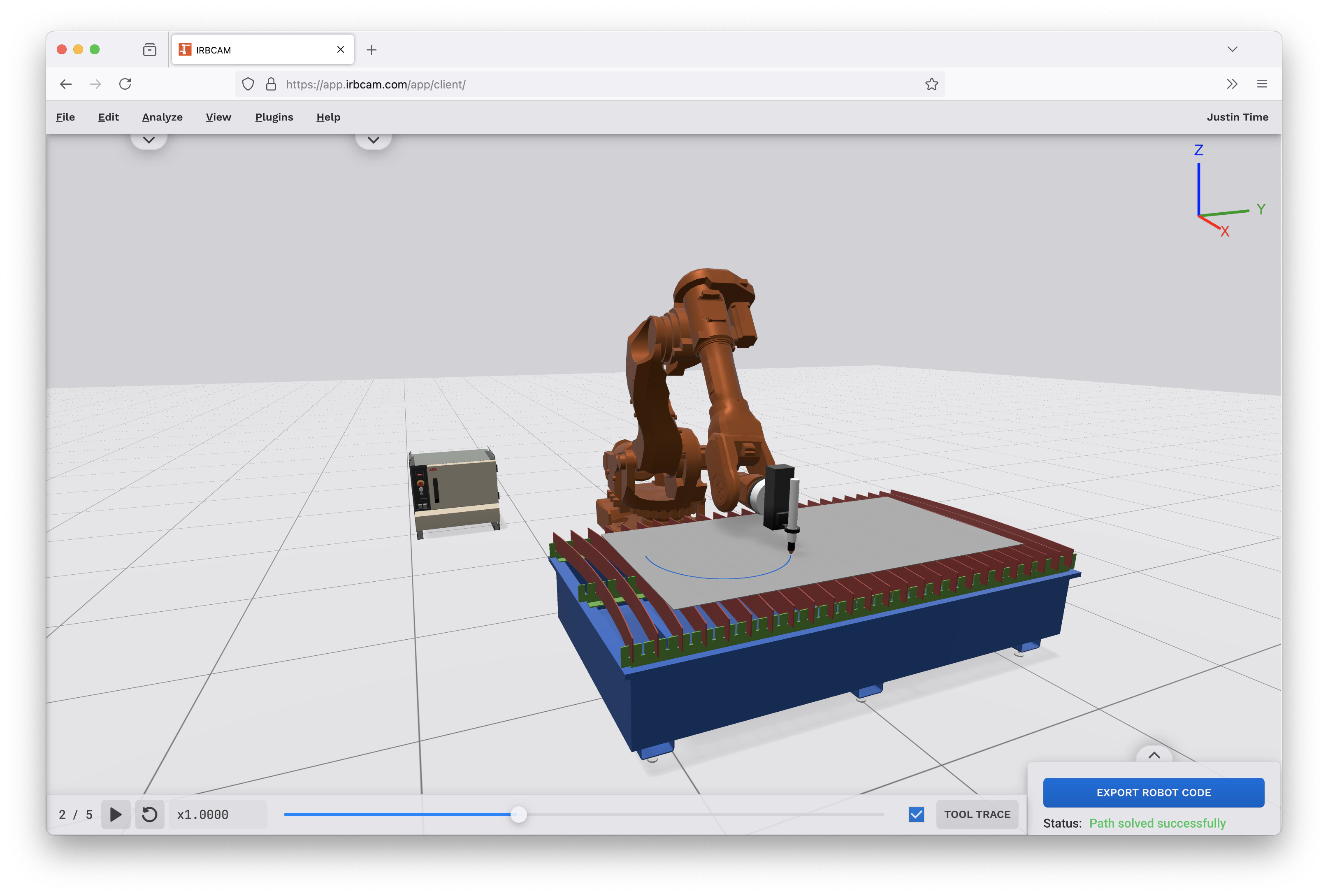
Being a web application, IRBCAM runs here in your browser. You don’t have to worry about installing, updating or where you store your projects. This also means that you can run IRBCAM on any device with a recent web browser and a medium or large display.
Production
IRBCAM is designed to bridge the gap between CAM software and industrial robots in material processing applications. While traditional machines like CNC mills can directly utilize CAM-generated code, industrial robots often require a different approach. IRBCAM can import toolpaths from APT format and provides an environment to simulate and verify tasks before running. Select your robot, import the toolpath and export your robot program. IRBCAM takes care of the mathematical transformations and your robot’s specific programming language. Read more about toolpaths